
近期,工學院張軍國教授牽頭的林木資源高效生產全國重點實驗室林業智能化裝備研究組,在機器人自主運動決策領域取得新進展,研究成果以 “Event-triggered Reconfigurable Reinforcement Learning Motion-planning Approach for Mobile Robot in Unknown Dynamic Environments”為題發表于國際人工智能領域的著名期刊《Engineering Applications of Artificial Intelligence》(中科院2區TOP, IF=7.802)。
近年來,機器人技術與強化學習的結合已成為該領域的前沿科技之一,并逐步推動了人類社會生產和生活方式的轉變。強化學習利用數據驅動的方式來提升機器人系統對復雜環境的應對能力,但隨之而來也出現了學習成本過高和自主決策穩定性不足的難題。
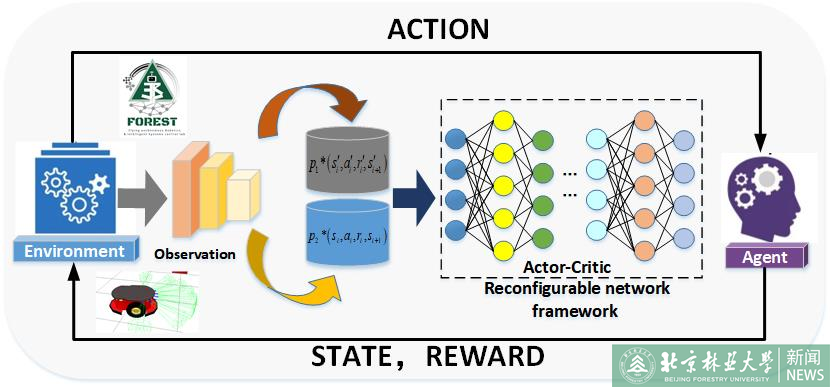
為了提升移動機器人在未知環境中的自主學習和高效決策能力,課題組開發了一種基于事件驅動的深度確定性策略梯度(RS-DDPG)運動規劃方法。利用樣本預處理技術和自適應獎勵機制,解決了強化學習網絡長期存在的獎勵稀疏和收斂困難的問題,促進了有限樣本資源的高效利用。結果表明,重構強化學習系統大幅減少了策略訓練時間,可靠性能高,可以在非結構復雜環境中精準決策。該項研究對移動機器人在非結構環境中的自主導航和目標搜索等任務具有潛在的應用價值。
本文第一作者為工學院博士生孫輝輝,通訊作者為胡春鶴副教授和張軍國教授,北京林業大學為第一完成單位。該工作得到了國家自然科學基金(61703047)資助。
文章鏈接:https://www.sciencedirect.com/science/article/pii/S0952197623003810?via%3Dihub